Content sections:
- Newton's First Law
- Newton's Second Law
- Newton's Third Law
- Identifying interactions: System Schemas and Force Diagrams
- Force Calculations
- Solving Force Problems
- Relating Representations of Motion and Force Models
- Solving Problems with Forces and Motion
What are forces? What types of forces are there? How can we describe the forces and interactions between objects?
...Fortunately, each of these questions can be answered.
DEFINITION: Forces are an interaction between two objects that results in a push, pull or some change in motion.
Types of forces:
Contact Non-Contact
Spring Gravity
Buoyant Electromagnetic
Tension Weak
Applied Strong
Normal
Describing Forces:
Force diagrams and system schemas are two simple ways to describe what forces are acting on an object
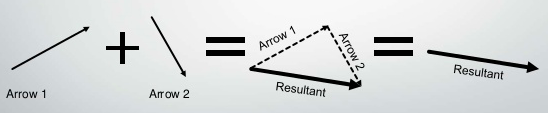
Forces in a force diagram can be used as vectors, quantities which have a magnitude and direction. The length of the arrow tells the magnitude of the force.
...Fortunately, each of these questions can be answered.
DEFINITION: Forces are an interaction between two objects that results in a push, pull or some change in motion.
Types of forces:
Contact Non-Contact
Spring Gravity
Buoyant Electromagnetic
Tension Weak
Applied Strong
Normal
Describing Forces:
Force diagrams and system schemas are two simple ways to describe what forces are acting on an object
Forces in a force diagram can be used as vectors, quantities which have a magnitude and direction. The length of the arrow tells the magnitude of the force.
Tip to Tail Method:
Horizontal and vertical parts of a vector are called components. And these components add up to create a resultant, which is the distant/result between tip and tail of the two vectors
Below is an example of a system schema and a force diagram personally drawn as my own enhancement...
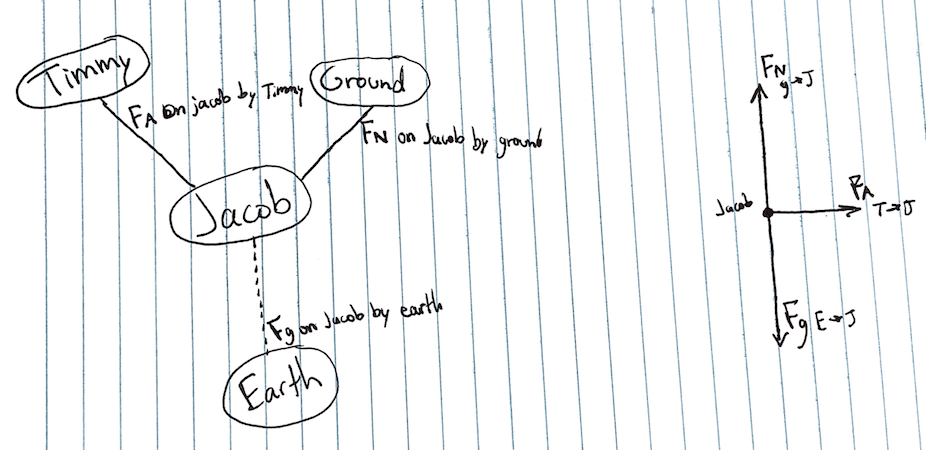
In a System Schema...
- Dotted Lines == Non-Contact Forces
- Solid Lines == Contact Forces
- The main object is in the center which forces are acted on
- Forces are represented as lines in the system
Stretch Force:
Fs = -K * ∆X
Spring Force = -(spring constant) * distance of stretch
Friction Force:
ƒ = μ * FN
Friction = coefficient of friction (mu) * Normal Force
Acceleration/mass/forces equations:
ΣF = ma
a = ΣF/m
Newton's First Law
(Law of inertia)
Things that are still remain still until some force acts on it. And something in motion will stay in motion until a force stops it.
Fs = -K * ∆X
Spring Force = -(spring constant) * distance of stretch
Friction Force:
ƒ = μ * FN
Friction = coefficient of friction (mu) * Normal Force
Acceleration/mass/forces equations:
ΣF = ma
a = ΣF/m
Newton's First Law
(Law of inertia)
Things that are still remain still until some force acts on it. And something in motion will stay in motion until a force stops it.
Newton's Second Law
Widget is loading comments...
